
GOAP for Unity 플러그인 분석

GOAP 란 무엇인가?
목표 지향 행동 계획 (Goal Oriented Action Planning)는 게임 인공지능(AI)에서 에이전트가 자율적으로 행동을 결정하고 게임 환경 내에서 특정 목표를 달성할 수 있도록 하는 기술이다.
GOAP는 게임의 비플레이어 캐릭터(NPC)에 복잡하고 적응적인 행동을 부여하는 데 사용되며 NPC가 자율적으로 행동을 결정하고 목표를 달성할 수 있도록 하는 기술이다.
복잡한 목표를 더 작은 행동으로 나누고, 이를 조합하여 목표에 도달하는 계획을 세우고 에이전트는 현재 상태와 목표 상태를 평가하고, 필요 시 계획을 동적으로 조정하여 목표를 달성한다.
GOAP Plugin 설명
- 해당 플러그인은 crashkonijn 이라는 사람이 만든 멀티스레드 기반의 유니티 잡 시스템을 사용하여 개발한 GOAP 플러그인이다.
주요 특징은 다음과 같다.
높은 퍼포먼스 - 유니티 잡 시스템을 활용한 멀티 스레드 작업으로 속도 최적화
스크립터블 오브젝트로 인젝트 가능
GOAP 를 편하게 디버깅 가능한 전용 노드 뷰어 제공
사진에 나와있는 2D 기반의 간단한 GOAP AI 를 구성한 샘플 프로젝트에 대해 PC, 모바일 기기 Android 부하 테스트를 진행했다.
플랫폼 별로 최대 2K 의 오브젝트를 움직이고, GOAP 의사결정을 진행하고 수행하는 것을 확인했다.
3D 오브젝트에 대해서도 모바일(LG V5)에서 부하 테스트를 진행하였고, 대략 500-최대 1K의 오브젝트까지 컨트롤이 가능했다.
예전에 개인적으로 유니티에 FlowFIeld(다익스트라) 알고리즘을 적용하여 메인 스레드 기반으로 1200 까지 늘려본적이 있는데
확실히 멀티스레드 기반의 계산이 들어가서 퍼포먼스적으로 매우 우월하다고 생각한다.
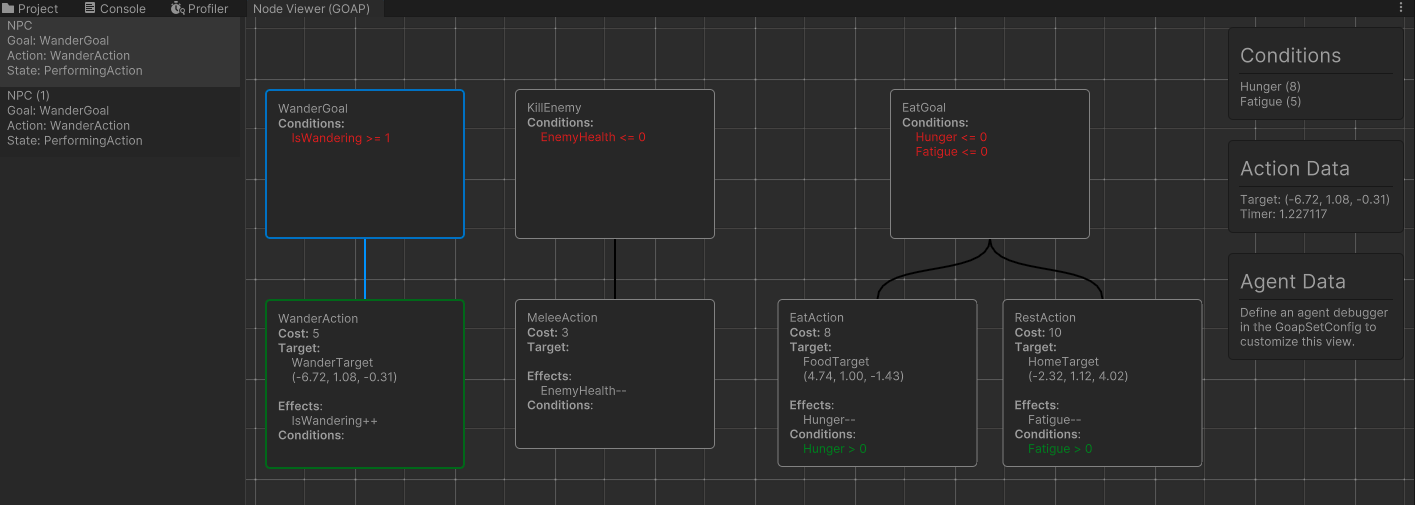
위 영상에서 구현한 NPC 의 GOAP 노드 뷰어이다.
이처럼 편하게 시각적으로 편하게 디버깅이 가능하다는 장점도 존재한다. (번거롭게 로그나 인스펙터로 수치를 확인하지 않아도 됨)
GOAP 클래스 구조
Goals
- GOAP 시스템에서는 에이전트가 달성하고자 하는 원하는 결과 또는 목표(Goals)를 설정할 수 있다.
1
2
3
4
5
6
7
8
9
using CrashKonijn.Goap.Behaviours;
namespace GOAP.Goals
{
public class WanderGoal : GoalBase
{
}
}
GoalBase 클래스를 상속하여 사용한다.
클래스 내부의 코드는 일절 필요없다. 왜냐하면 Planner 가 Goal 을 빌드할 때 필요한 Condition 들을 헤더함수를 통해 추가가 가능하기 때문이다.
1
2
3
4
5
6
7
8
9
builder.AddGoal<WanderGoal>()
.AddCondition<IsWandering>(Comparison.GreaterThanOrEqual, 1);
builder.AddGoal<KillEnemy>()
.AddCondition<EnemyHealth>(Comparison.SmallerThanOrEqual, 0);
builder.AddGoal<EatGoal>()
.AddCondition<Hunger>(Comparison.SmallerThanOrEqual, 0)
.AddCondition<Fatigue>(Comparison.SmallerThanOrEqual, 0);
여기서 IsWandering, EnemyHealth, Hunger, Fatigue 등은 WorldKey 로 에이전트가 다음에 수행해야할 작업을 결정하는 지표역할을 맡는다.
예를 들어, Hunger와 Fatigue 가 둘 다 0이하 여야만 다음 Goal 을 설정할 수 있다.
특히 현재 목표를 완료한 뒤에는 다음 의사결정을 내리기 위한 지표들(WorldKey) 혹은 Sensor 에서 검출한 Target들을 선별하여 목표를 설정한다.
Actions
- 에이전트가 특정 목표를 달성하기 위해 수행할 수 있는 단계들이라고 보면 된다.
- Planner 에 Action 을 추가할 수 있다.
- SetTarget 을 통해 목표의 위치값을 설정한다. 즉, SetTarget 으로 TargetKeyBase 클래스를 상속받는 Target을 매핑한다. 이 Target 은 Sensor 에서 검출해낸 오브젝트의 Vector3 를 뜻한다.
- Condition 과 Effect 를 추가할 수 있다.
- Condition 을 통해 전제 조건을 설정할 수 있다. 예시에서는 거리가 10 이하인지 판단한다.
- Effect 는 액션이 실행될 때 WorldKey 값을 증가, 감소 하는 역할을 한다.
1
2
3
4
5
builder.AddAction<WanderAction>().SetTarget<WanderTarget>()
.AddCondition<InRange>(Comparison.SmallerThanOrEqual, 10)
.AddEffect<IsWandering>(EffectType.Increase)
.SetBaseCost(5)
.SetInRange(10);
여기서 SetBaseCost, SetInRange(휴리스틱) 를 주목해야한다.
코드를 보면, WanderAction 을 수행하기 위해서는 BaseCost 값과 에이전트와 WanderTarget의 Distance 를 의미하는 InRange 값의 합을 판단하여 나온 낮은 값을 기반으로 의사결정을 내린다.
- 즉, 거리가 똑같더라도 BaseCost 가 낮으면 그 Action 을 우선적으로 수행한다는 것이다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
builder.AddAction<EatAction>()
.SetTarget<FoodTarget>()
.AddCondition<Hunger>(Comparison.GreaterThan, 0)
.AddEffect<Hunger>(EffectType.Decrease)
.SetBaseCost(8)
.SetInRange(1);
builder.AddAction<RestAction>()
.SetTarget<HomeTarget>()
.AddCondition<Fatigue>(Comparison.GreaterThan, 0)
.AddEffect<Fatigue>(EffectType.Decrease)
.SetBaseCost(10)
.SetInRange(1);
- WorldSensor 가 Hunger, Fatigue 둘 다 Action 수행 여부를 결정하는 값인 20(임의)을 동시에 넘겼을 경우 EatAction 을 먼저 수행하게 된다.
특히 SetInRange 는 내부적으로 잡 시스템을 활용하여 A* 알고리즘의 휴리스틱과 유사하게 만들어 놓았는데
GraphResolverJob(Planner) 이라는 패키지 내부적으로 캐시된 클래스를 뜯어본 결과 내부적으로 다음 휴리스틱 메소드가 존재했다.
단순한 직선 거리를 계산하는 코드지만, 이런 Distance 휴리스틱과 BaseCost 기반으로 어떤 Action 을 취할지에 대한 의사결정을 내릴지 계산한다.
1
2
3
4
5
6
7
8
9
10
11
12
private float Heuristic(int currentIndex, int previousIndex)
{
var previousPosition = this.RunData.Positions[previousIndex];
var currentPosition = this.RunData.Positions[currentIndex];
if (previousPosition.Equals(InvalidPosition) || currentPosition.Equals(InvalidPosition))
{
return 0f;
}
return math.distance(previousPosition, currentPosition) * this.RunData.DistanceMultiplier;
}
실제 사용 방법
RestAction.cs
기본적으로 Created, Start, Perform, End 메소드를 오버라이드하여 커스텀이 가능하다.
Perform 에서는 FSM 과 비슷하게, 전체 Goal-Actions 간의 트리 구조에서 현재 Action 을 매 프레임 업데이트한다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
public class RestAction : ActionBase<RestAction.Data>, Iinjectable
{
public override void Start(IMonoAgent agent, Data data)
{
data.Fatigue.enabled = false;
data.Timer = 1f;
}
public override ActionRunState Perform(IMonoAgent agent, Data data, ActionContext context)
{
data.Timer -= context.DeltaTime;
data.Fatigue.Fatigue -= context.DeltaTime * BioSigns.FatigueRestorationRate;
data.Animator.SetBool(IS_SLEEPING, true);
if (data.Target == null || data.Fatigue.Fatigue <= 0)
{
return ActionRunState.Stop;
}
return ActionRunState.Continue;
}
public override void End(IMonoAgent agent, Data data)
{
data.Animator.SetBool(IS_SLEEPING, false);
data.Fatigue.enabled = true;
}
}
- 여기서 Data data 의 구조는 다음과 같다.
1
2
3
4
5
6
7
8
9
10
11
12
public class CommonData : IActionData
{
public ITarget Target { get; set; }
public float Timer { get; set; }
}
public class Data : CommonData
{
[GetComponent] public Animator Animator { get; set; }
[GetComponent] public FatigueBehavior Fatigue { get; set; }
}
1
2
3
4
5
6
7
public class WanderAction : ActionBase<CommonData>
{
public override void Start(IMonoAgent agent, CommonData data)
{
}
}
- 제네릭 타입에 따라 파라미터 타입이 달라진다.
FatigueBehavior.cs
- Behaviors 는 Monobehaviour 를 상속받는 클래스를 의미하며 실제로 각종 파라미터의 수치들, 유니티의 게임 오브젝트, 리스트 등 각종 모노와 관련된 작업을 수행한다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
[RequireComponent(typeof(Animator), typeof(AgentBehaviour))]
public class FatigueBehavior : MonoBehaviour
{
[field: SerializeField] public float Fatigue { get; set; }
[field: SerializeField] public Transform HomeTransform { get; set; }
[FormerlySerializedAs("BioSings")] [SerializeField] private BioSignSO BioSigns;
private void Awake()
{
Fatigue = Random.Range(0, BioSigns.MaxFatigue);
}
private void Start()
{
HomeTransform = Managers.BuildingManager.buildingList[0].transform;
}
private void Update()
{
Fatigue += Time.deltaTime * BioSigns.FatigueDepletionRate;
}
}
GOAP 시스템의 핵심에 대해
- GOAP 시스템과 인게임 상황을 분리해서 생각을 해야한다.
- GOAP 시스템의 단일 목적은 사실상 특정 Goal 에 대한 최적의 Action 을 찾는 것이다. 주의할 점은 최적의 Goal 을 찾는 행위는 인게임에 의존적이며 이는 GOAP 시스템에 포함되어 있지 않다.
- 최적의 Goal 을 찾는 방법은 FSM 일 수도 있으며 BT 일 수도 있고, 상위에 또 다른 GOAP (Action 만을 수행하는)를 만들어 관리할 수도 있다.
GOAP 시스템은 본질적으로 다음 두 가지 일을 수행한다.
- Goal 과 그에 연결되는 Action 의 그래프를 생성한다.
- 해당 그래프를 기반으로 현재 설정된 Goal 을 이루기 위한 최적의 Action 을 찾는다.
여기서 그래프를 작성하기 위해 GOAP 시스템은 Action 이 어떤 종류의 Effect 를 가지고 있는지 알아야하며, 이는 실제로 인게임 데이터를 매핑(포인터)하여 시스템에서 인식하게 된다.
예를 들어, FixHungerGoal 이 있다고 가정해보면, 이 Goal 은 IsHungry <= 50 이라는 Condition 을 지니고 있다.
여기서 EatAppleAction 은 IsHungry– 감소시키는 Effect를 지니고 있다. 이렇게 EatAppleAction 을 수행하면 Goal 을 향해 게임이 어떻게 변하고 있는지 알 수 있게 되고, 그 Action 과 Goal 간의 연결이 만들어진다.
다음 그림을 살펴보면
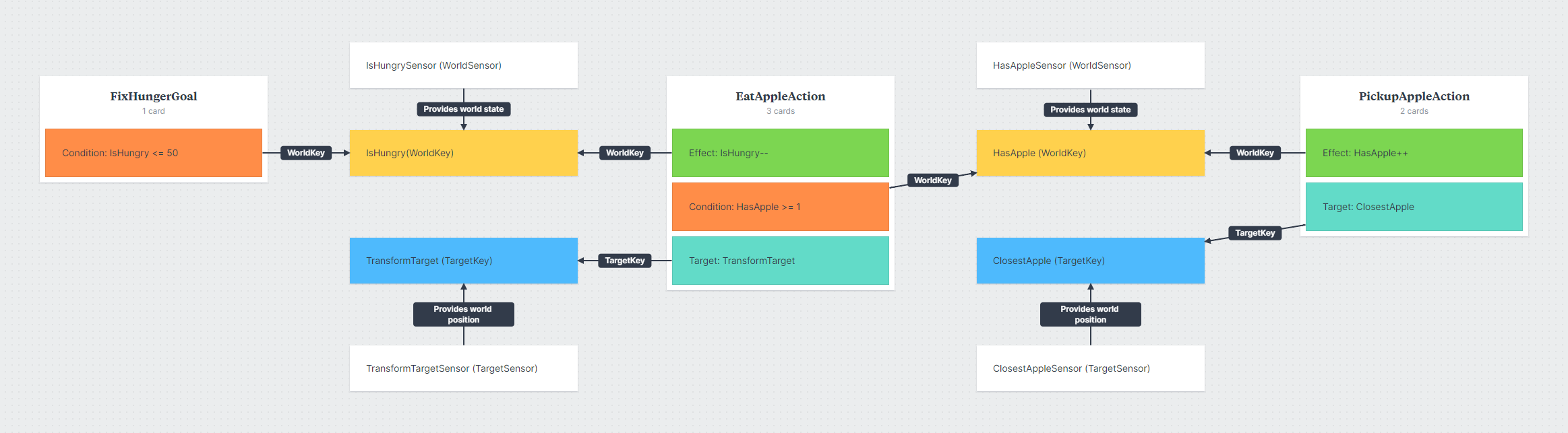
- FixHungerGoal 이 활성화되기 위해 에이전트의 배고픔 상태(IsHungry)가 50 이하이어야 한다.
- IsHungrySensor는 에이전트의 현재 배고픔 상태를 평가하여, 이를 IsHungry 월드 키에 매핑한다.
- TransformTargetSensor는 에이전트의 목표 위치(TransformTarget)를 평가하여, 이를 TransformTarget 타겟 키에 설정한다.
- EatAppleAction은 에이전트가 사과를 가지고 있고(HasApple >= 1), 목표 위치에서 수행된다. 이 행동은 배고픔 상태(IsHungry)를 감소시킨다.
- HasAppleSensor는 에이전트가 사과를 가지고 있는지를 평가하여, 이를 HasApple 월드 키에 설정한다.
- ClosestAppleSensor는 가장 가까운 사과의 위치를 평가하여, 이를 ClosestApple 타겟 키에 설정한다.
- PickupAppleAction은 에이전트가 가장 가까운 사과 위치에서 사과를 획득하는 행동이다. 이 행동은 에이전트의 사과 상태(HasApple)를 증가시킨다.
Sensor
센서는 GOAP 가 현재 게임의 상황을 이해할 수 있도록 도와주는 기능이다.
크게 WorldSensor(Gloabal), TargetSensor(Local) 로 나뉜다.
Global Sensor
Global 센서는 모든 에이전트에 대한 정보를 제공한다. 예를 들어 IsDaytimeSensor는 모든 사람이 낮인지 밤인지 확인한다.
실제로 헷갈렸던 부분인데, Sensor 가 어떻게 WorldKey 를 인식하는것인지? 였다.
1
2
builder.AddWorldSensor<HungerSensor>()
.SetKey<Hunger>();
WorldKey 로 설정한 Hunger를 Planner 를 통해 WorldSensor 에 매핑하기 때문에 인식이 가능했었다. 따라서 Behavior나 Action 에서 증가, 감소를 실행하면 WorldSensor 에서 상태를 파악하고 GOAP 에 해당 정보를 전송해준다.
이후 GOAP 는 해당 정보를 기반으로 어떤 Action 을 취할지 결정한다.
Local Sensor
- Planner가 실행될 때 작동하며, 단 하나의 에이전트의 정보만 제공한다. 예를 들어 FoodTargetSensor 는 가장 가까운 음식을 찾는다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
public class HungerSensor : LocalWorldSensorBase
{
...
public override SenseValue Sense(IMonoAgent agent, IComponentReference references)
{
return new SenseValue(Mathf.CeilToInt(references.GetCachedComponent<HungerBehavior>().Hunger));
}
...
}
public class FoodTargetSensor : LocalTargetSensorBase, Iinjectable
{
...
public override ITarget Sense(IMonoAgent agent, IComponentReference references)
{
Vector3 agentPosition = agent.transform.position;
int hits = Physics.OverlapSphereNonAlloc(agentPosition, BioSigns.FoodSearchRadius, Colliders,
BioSigns.FoodLayer);
if (hits == 0)
{
return null;
}
for (int i = Colliders.Length - 1; i > hits; i--)
{
Colliders[i] = null;
}
Colliders = Colliders.OrderBy(collider =>
collider == null
? 999
: (collider.transform.position - agent.transform.position).sqrMagnitude).ToArray();
return new PositionTarget(Colliders[0].transform.position);
}
...
}
Injector
- Data Injection 은 다른 객체나 모듈에 런타임 데이터를 제공하는 디자인 패턴이다.
- GOAP 시스템에서 관리하는 핵심 클래스(Goal, Action, Sensor)에 특정 데이터나 종속성을 제공하는 데 사용된다.
- 특히 디커플링을 위해 자주 사용하는데, 핵심 로직을 수정하지 않고 스크립터블 오브젝트로 Injectable 데이터를 주입해서 GOAP 클래스를 일반적이고 재사용 가능하게 활용할 수 있다.
- 예를 들어, 직업별로 이동속도와 같은 스탯이 다를 경우 직업별로 스크립터블 오브젝트를 생성하고 Injectable 인터페이스를 각 클래스에 상속시켜서 모듈식으로 활용이 가능하다.
연구 목표
- GOAP 를 제대로 활용하기 위해서는, 인게임 상태와 GOAP 시스템을 분리해서 생각해야한다는 점
- 이를 위해 FSM, BT, Layered GOAP 들 중 프로젝트에 알맞는 방법을 활용하여 복잡한 알고리즘 속에서 최적의 Goal 을 선택하는 로직을 잘 구현해야한다는 점
- 특정 Goal 을 달성하기 위한 최적의 Action 을 수행하기 위해 Condition 과 Effect 를 설정하여 알고리즘을 구현해야한다는 점
- 각 GOAP 들의 Goal, Action 들에 대한 데이터 관리 방법을 정해야 한다는 점 (세이브/로드도 고려해야함)
- 이 부분은 crashkonjin 이 새로이 출시한 Blackboard 시스템을 사용하면 될 것 같다.