
CS 로드맵 (1) — 배열과 연결 리스트: 메모리의 지형을 읽다

- 배열은 연속된 메모리에 데이터를 저장하여 캐시 지역성의 이점을 최대로 누리며, L1 캐시 히트(~1ns)와 RAM 접근(~100ns) 사이에는 100배의 지연 시간 차이가 존재한다
- 연결 리스트는 O(1) 삽입/삭제의 이론적 장점에도 불구하고, 현대 하드웨어에서는 캐시 미스로 인해 배열 기반 구조보다 대부분의 실무 시나리오에서 느리다
- 동적 배열의 기하급수적 성장 전략(2배 또는 1.5배)은 상각 분석을 통해 O(1) 삽입을 보장하며, 성장 인자의 선택은 메모리 재사용 가능성에 영향을 준다
- Big-O 표기법은 상수를 무시하지만, 그 '상수'에 해당하는 캐시 미스 비용이 현대 컴퓨팅에서는 알고리즘 복잡도만큼이나 성능을 결정한다

서론
이 문서는 CS 로드맵 시리즈의 1번째 편입니다.
프로그래밍을 시작하면 누구나 배열을 배운다. int arr[10]이라고 쓰면 정수 10개를 담을 공간이 생긴다. 그 다음에 연결 리스트를 배운다. 노드를 포인터로 연결하면 크기를 동적으로 조절할 수 있다. 교과서는 이렇게 가르친다:
- 배열: 접근 O(1), 삽입/삭제 O(n)
- 연결 리스트: 접근 O(n), 삽입/삭제 O(1)
“상황에 따라 적절히 선택하세요.” 여기서 대부분의 교육이 끝난다.
하지만 이 설명에는 결정적으로 빠진 것이 있다. 메모리다. 자료구조는 추상적 개념이 아니라, 실제 하드웨어 위에서 동작하는 물리적 구조다. 배열의 원소가 메모리 어디에 놓이는지, 연결 리스트의 노드가 힙 어디에 흩어지는지, CPU가 데이터를 가져올 때 어떤 경로를 거치는지 — 이것을 모르면 자료구조를 절반만 이해한 것이다.
이 글은 배열과 연결 리스트를 메모리의 관점에서 다시 본다.
이후 시리즈 구성:
| 편 | 주제 | 핵심 질문 |
|---|---|---|
| 1편 (이번 글) | 배열과 연결 리스트 | 같은 O(n) 순회인데 왜 100배 차이가 나는가? |
| 2편 | 스택, 큐, 덱 | LIFO와 FIFO는 어디에서 쓰이는가? |
| 3편 | 해시 테이블 | 해시 함수는 어떻게 설계하고, 충돌은 어떻게 해결하는가? |
| 4편 | 트리 | BST, Red-Black Tree, B-Tree는 왜 필요한가? |
| 5편 | 그래프 | 탐색, 최단 경로, 위상 정렬의 원리는? |
| 6편 | 메모리 관리 | 스택/힙, GC, 수동 메모리 관리의 트레이드오프는? |
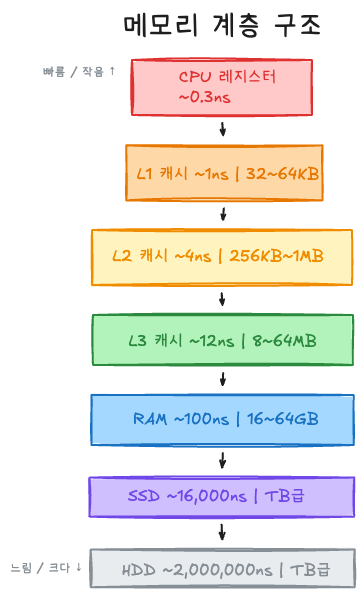
Part 1: 메모리 계층 구조 — 모든 것의 출발점
자료구조를 이해하기 전에, 그 자료구조가 올라가는 무대를 먼저 이해해야 한다. 그 무대가 메모리 계층 구조(Memory Hierarchy)다.
왜 메모리가 계층적인가
이상적인 메모리는 무한히 크고, 무한히 빠르고, 무한히 싸야 한다. 현실에서는 이 세 가지가 동시에 성립하지 않는다:
- 빠른 메모리는 비싸고 작다 (SRAM → 캐시)
- 큰 메모리는 느리고 싸다 (DRAM → RAM)
- 거대한 저장장치는 더 느리다 (SSD, HDD)
이 물리적 제약 때문에, 현대 컴퓨터는 메모리를 계층적으로 구성한다. 자주 쓰는 데이터는 가까이, 가끔 쓰는 데이터는 멀리 둔다.
지연 시간 — 숫자로 보는 현실
Jeff Dean(Google)이 정리한 “Latency Numbers Every Programmer Should Know”는 시스템 프로그래밍의 기본 상식이다.
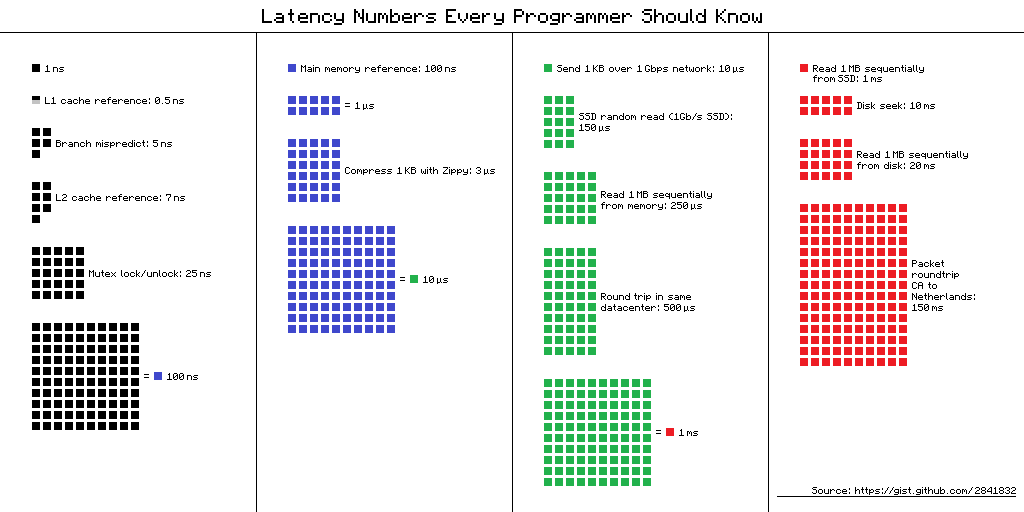 Jeff Dean의 지연 시간 수치를 시각화한 다이어그램. 작은 검은 사각형(1ns)이 L1 캐시, 큰 파란 블록(100ns)이 RAM 접근을 나타낸다. 크기 차이가 곧 성능 차이다. (출처: gist.github.com/2841832)
Jeff Dean의 지연 시간 수치를 시각화한 다이어그램. 작은 검은 사각형(1ns)이 L1 캐시, 큰 파란 블록(100ns)이 RAM 접근을 나타낸다. 크기 차이가 곧 성능 차이다. (출처: gist.github.com/2841832)
아래는 현대 하드웨어 기준의 대략적인 수치다. CPU 종류나 장치에 따라 2~3배 정도 달라질 수 있으므로, 정확한 상수가 아니라 “어느 정도 규모인가”를 잡기 위한 참고치로 읽어야 한다:
| 계층 | 지연 시간 | 비유 (1ns = 1초로 환산) |
|---|---|---|
| L1 캐시 참조 | ~1 ns | 1초 |
| 분기 예측 미스 | ~3 ns | 3초 |
| L2 캐시 참조 | ~4 ns | 4초 |
| L3 캐시 참조 | ~12 ns | 12초 |
| Mutex lock/unlock | ~17 ns | 17초 |
| RAM 참조 | ~100 ns | 1분 40초 |
| 1KB 데이터 압축 | ~3,000 ns | 50분 |
| SSD 랜덤 읽기 | ~16,000 ns | 4시간 26분 |
| SSD 1MB 순차 읽기 | ~49,000 ns | 13시간 |
| HDD 탐색 | ~2,000,000 ns | 23일 |
| HDD 1MB 순차 읽기 | ~825,000 ns | 9.5일 |
잠깐, 용어 정리
ns(나노초)란? 1나노초(nanosecond)는 10억 분의 1초다. 1ns = 0.000000001초. 눈을 한 번 깜빡이는 데 약 3억 ns가 걸린다. CPU가 동작하는 세계에서는 1ns도 충분히 긴 시간이다.
L1, L2, L3 캐시란? CPU 칩 내부에 물리적으로 내장된 초고속 메모리다. 숫자가 작을수록 CPU 코어에 더 가깝고, 더 빠르고, 더 작다:
- L1 캐시 — CPU 코어 바로 옆. 가장 빠르다(~1ns). 실제로 L1은 “코드를 담는 캐시(L1I)”와 “데이터를 담는 캐시(L1D)” 둘로 나뉘어 있다. 배열이나 연결 리스트 같은 자료구조가 사용하는 것은 데이터 캐시(L1D) 쪽이며, 코어당 보통 32~64KB 크기다.
- L2 캐시 — L1 뒤에 위치. 코어당 256KB~1MB. 약간 느리다(~4ns).
- L3 캐시 — 여러 코어가 공유. 8~64MB. 더 느리지만(~12ns) RAM(~100ns)보다는 훨씬 빠르다.
이 세 계층이 RAM과 CPU 사이에서 속도 차이를 완충하는 역할을 한다. 데이터가 L1에 있으면 ~1ns, 없어서 RAM까지 가야 하면 ~100ns — 수십~100배 느려질 수 있다. 물론 CPU는 “다음에 필요할 데이터를 미리 가져오기(프리페처)”, “명령어를 순서와 무관하게 실행하기” 등의 기법으로 이 지연을 일부 줄여주지만, 캐시에 없는 데이터를 반복적으로 접근하면 성능 차이는 여전히 크다.
핵심을 다시 보자. L1 캐시 접근은 ~1ns, RAM 접근은 ~100ns. 약 100배 차이다. CPU가 여러 최적화 기법으로 이 차이를 일부 줄여주긴 하지만, 캐시 미스가 쌓이면 성능 차이는 여전히 극적이다. 이것이 자료구조 선택이 중요한 진짜 이유다.
캐시는 어떻게 동작하는가
CPU가 메모리 주소 0x1000의 데이터를 요청한다고 하자. CPU는 먼저 L1 캐시를 확인한다. 있으면 캐시 히트(cache hit) — 1ns만에 데이터를 가져온다. 없으면 캐시 미스(cache miss) — L2, L3, 최악의 경우 RAM까지 내려가야 한다.
여기서 중요한 것은, CPU가 0x1000 한 바이트만 가져오지 않는다는 점이다. CPU는 캐시 라인(cache line) 단위로 데이터를 가져온다. 현대 CPU의 캐시 라인 크기는 대부분 64바이트다.
1
2
3
4
메모리 주소: 0x1000 0x1004 0x1008 ... 0x103C
├──────────── 64바이트 캐시 라인 ────────────┤
│ int[0] int[1] int[2] ... int[15] │
└───────────────────────────────────────────┘
int(4바이트) 배열에서 arr[0]을 읽으면, arr[1]부터 arr[15]까지 공짜로 캐시에 올라온다. 이것이 공간 지역성(spatial locality)이다. 이웃한 메모리를 곧 사용할 가능성이 높으므로, 미리 가져오는 것이다.
또 하나, arr[0]을 읽은 직후 또 arr[0]을 읽으면 캐시에 이미 있다. 이것이 시간 지역성(temporal locality)이다. 최근에 접근한 데이터를 곧 다시 사용할 가능성이 높다.
현대 CPU는 여기서 한 발 더 나간다. 하드웨어 프리페처(hardware prefetcher)가 메모리 접근 패턴을 감지하여, 다음에 필요할 데이터를 미리 캐시에 올려놓는다. 순차적으로 배열을 순회하면, 프리페처가 앞서서 데이터를 준비한다. 연속된 메모리 접근은 하드웨어 수준에서 최적화된다.
잠깐, 이건 짚고 넘어가자
Q. 캐시 라인이 64바이트라는 건 어떻게 확인하나?
Linux에서는
getconf LEVEL1_DCACHE_LINESIZE명령으로 확인할 수 있다. macOS에서는sysctl hw.cachelinesize. 대부분의 x86, ARM 프로세서에서 64바이트다. 일부 임베디드 시스템에서는 32바이트인 경우도 있다.Q. 캐시가 꽉 차면 어떻게 되나?
새 데이터가 들어오면, 기존 캐시 라인 중 하나를 퇴거(evict)시켜야 한다. 이때 캐시 전체에서 가장 오래된 라인을 고르는 게 아니라, 메모리 주소에 따라 정해진 작은 그룹(set) 안에서만 교체 대상을 고른다. 교체 정책은 이론적으로는 “가장 오래 사용하지 않은 것을 내보내는” LRU(Least Recently Used)가 유명하지만, 실제 CPU는 이를 단순화한 근사 알고리즘을 쓰는 경우가 많다.
Part 2: 배열 — 연속 메모리의 힘
배열의 정의
배열(array)은 같은 타입의 원소가 연속된 메모리 공간에 순서대로 저장되는 자료구조다. 이것이 배열의 전부이자, 배열이 강력한 이유의 전부다.
int arr[8]을 선언하면 메모리에 이렇게 배치된다:
1
2
3
4
5
주소: 0x100 0x104 0x108 0x10C 0x110 0x114 0x118 0x11C
┌──────┬──────┬──────┬──────┬──────┬──────┬──────┬──────┐
│ a[0] │ a[1] │ a[2] │ a[3] │ a[4] │ a[5] │ a[6] │ a[7] │
└──────┴──────┴──────┴──────┴──────┴──────┴──────┴──────┘
4byte 4byte 4byte 4byte 4byte 4byte 4byte 4byte
32바이트. 정확히 캐시 라인 절반이다. 이 배열 전체가 캐시 라인 하나(또는 둘)에 들어간다.
O(1) 랜덤 접근 — 왜 가능한가
arr[5]에 접근하려면, 시작 주소에서 5 × sizeof(int) = 20바이트만 더하면 된다:
단순한 덧셈과 곱셈 한 번. 이것이 O(1) — 원소가 100만 개여도 인덱스만 알면 한 번에 접근한다. 배열의 가장 근본적인 강점이다.
캐시 친화적 순회
배열의 진짜 위력은 순회(traversal)에서 드러난다.
1
2
3
4
5
// 배열 순회: 메모리를 순차적으로 접근
int sum = 0;
for (int i = 0; i < N; i++) {
sum += arr[i]; // 연속된 주소를 순서대로 접근
}
이 루프가 실행될 때 하드웨어에서 일어나는 일:
arr[0]접근 → 캐시 미스 → RAM에서 64바이트(arr[0]~arr[15]) 로드arr[1]~arr[15]접근 → 전부 캐시 히트 (이미 로드됨)arr[16]접근 → 캐시 미스 → 다음 64바이트 로드- 반복…
16번 접근 중 15번이 캐시 히트. 캐시 히트율 93.75%. 여기에 하드웨어 프리페처가 패턴을 감지하여 다음 캐시 라인을 미리 가져오면, 사실상 거의 모든 접근이 L1 캐시에서 해결된다.
삽입과 삭제의 비용
배열의 단점은 중간 삽입/삭제다. arr[3]에 새 원소를 넣으려면:
1
2
3
4
5
삽입 전: [1] [2] [3] [5] [6] [7] [8] [ ]
↓
삽입 후: [1] [2] [3] [4] [5] [6] [7] [8]
↑insert →→→→→→→→→→→→
4개 원소를 오른쪽으로 이동
n개 원소 중 위치 i에 삽입하면, n - i개 원소를 한 칸씩 밀어야 한다. 최악의 경우(맨 앞 삽입) O(n). 하지만 이 “밀기” 연산 자체는 memcpy/memmove로 구현되며, 연속된 메모리 복사는 CPU와 캐시에 매우 친화적이다. 나중에 연결 리스트와 비교할 때 이 부분을 다시 보게 된다.
Part 3: 연결 리스트 — 포인터의 세계
연결 리스트의 정의
연결 리스트(linked list)는 각 원소(노드)가 데이터와 다음 노드의 주소(포인터)를 함께 저장하는 자료구조다.
1
2
3
4
struct Node {
int data; // 4바이트
Node* next; // 8바이트 (64비트 시스템)
};
하나의 노드에 최소 12바이트(패딩 포함 시 16바이트)가 필요하다. 4바이트 데이터를 저장하기 위해 최소 3~4배의 메모리를 사용한다. 이것이 첫 번째 비용이다.
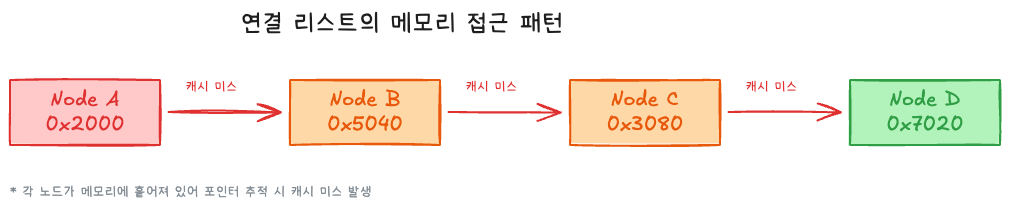
메모리 배치 — 흩어진 노드들
배열과 달리, 연결 리스트의 노드는 힙(heap)에 개별적으로 할당된다. 할당 순서, 힙 상태, 메모리 단편화에 따라 노드의 물리적 위치는 제각각이다:
1
2
3
4
5
6
7
8
9
10
11
메모리 공간:
0x2000: [Node A | data=1 | next=0x5040 ]
0x2010: (다른 객체가 사용 중)
...
0x5040: [Node B | data=2 | next=0x3080 ]
0x5050: (다른 객체가 사용 중)
...
0x3080: [Node C | data=3 | next=0x7020 ]
...
0x7020: [Node D | data=4 | next=NULL ]
Node A에서 Node B로 가려면 0x2000에서 0x5040으로 점프해야 한다. 12KB 이상 떨어져 있다. 캐시 라인이 64바이트이므로, 거의 모든 노드 접근이 캐시 미스를 유발한다.
O(1) 삽입/삭제 — 이론적 장점
연결 리스트의 교과서적 장점은 삽입/삭제다. 특정 노드를 알고 있다면, 포인터만 바꾸면 된다:
1
2
3
4
5
삽입 전: A → B → D
삽입 후: A → B → C → D
B->next = C // 1. 새 노드가 D를 가리키게
C->next = D // 2. B가 새 노드를 가리키게
원소를 밀거나 복사할 필요가 없다. O(1). 하지만 여기에 중요한 전제가 있다: 삽입 위치의 노드를 이미 알고 있어야 한다. 위치를 모르면 처음부터 순회해야 하므로 O(n)이다.
이중 연결 리스트
실무에서는 단일 연결 리스트보다 이중 연결 리스트(doubly linked list)를 더 자주 사용한다:
1
2
3
4
5
6
struct DNode {
int data; // 4바이트
DNode* prev; // 8바이트
DNode* next; // 8바이트
};
// 패딩 포함 최소 24바이트 — 데이터 대비 6배
양방향 순회와 O(1) 삭제(노드 자신만 알면 전임자에 접근 가능)가 가능하지만, 메모리 오버헤드는 더 커진다.
Part 4: 성능의 진실 — 이론과 현실의 괴리
Bjarne Stroustrup의 실험
C++의 창시자 Bjarne Stroustrup은 여러 강연에서 std::vector vs std::list 벤치마크를 반복적으로 보여주었다. 실험 내용은 이렇다:
테스트: N개의 정수를 정렬된 상태로 유지하면서 랜덤 삽입/삭제를 반복
std::vector: 삽입 위치를 이진 탐색으로 찾고, 원소를 밀어서 삽입std::list: 삽입 위치를 처음부터 순회해서 찾고, 포인터를 교체하여 삽입
교과서적 예측: 리스트가 유리해야 한다. 삽입이 O(1)이니까.
실제 결과: N이 수백 개를 넘어가는 순간부터 vector가 list를 압도했다. N이 커질수록 격차는 벌어졌다.
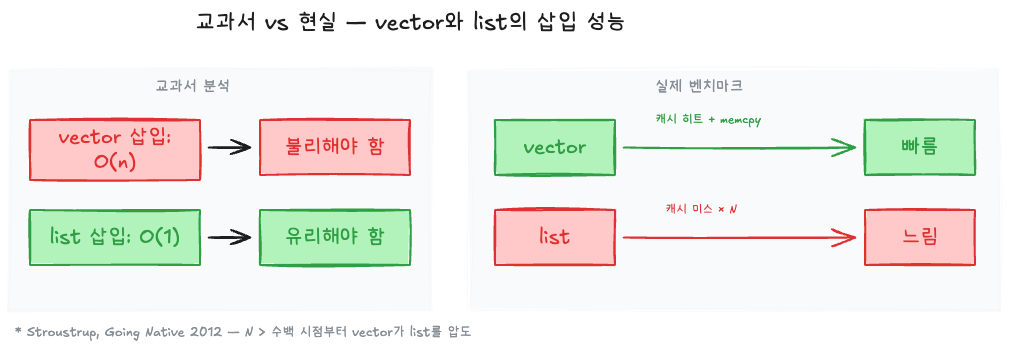
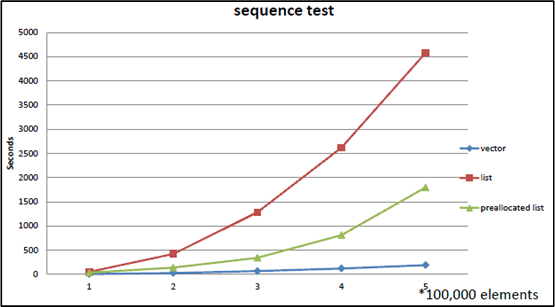 Bjarne Stroustrup의 Going Native 2012 발표에서 재현된 벤치마크. 원소 수가 늘어날수록 vector(파란선)와 list(빨간선)의 격차가 극적으로 벌어진다. 심지어 미리 할당된 list(초록선)조차 vector를 이기지 못한다.
Bjarne Stroustrup의 Going Native 2012 발표에서 재현된 벤치마크. 원소 수가 늘어날수록 vector(파란선)와 list(빨간선)의 격차가 극적으로 벌어진다. 심지어 미리 할당된 list(초록선)조차 vector를 이기지 못한다.
이유는 Part 1에서 설명한 메모리 계층 구조에 있다:
- vector의 순회: 연속 메모리 → 캐시 히트 → 프리페처 작동 → 거의 L1 속도
- list의 순회: 흩어진 노드 → 캐시 미스 → RAM 접근 → 100배 느림
- vector의 원소 이동:
memmove→ 연속 메모리 블록 복사 → CPU가 매우 효율적으로 처리 - list의 메모리 할당:
new Node()→ 힙 할당 → 비용이 큼
Stroustrup의 결론:
“Don’t store data in a linked list unless you need to. Use a compact data structure. Vector beats list for almost everything.”
숫자로 환산
100만 개의 int를 순회하는 시나리오를 계산해보자:
배열:
- 캐시 라인당 16개 int(64B / 4B)
- 필요한 캐시 라인 로드: 1,000,000 / 16 = 62,500회
- 프리페처가 작동하면 대부분 L1 히트 → ~1ns × 1,000,000 ≈ ~1ms
연결 리스트:
- 노드당 캐시 미스 가능성 높음
- 최악: RAM 접근 ~100ns × 1,000,000 = ~100ms
같은 “O(n) 순회”인데 100배 차이. Big-O가 동일해도, 상수가 100배 다르다.
2023년 발표된 논문 “RIP Linked List”(arXiv:2306.06942)는 이 현상을 대규모로 실증했다. 다양한 리스트 구현을 벤치마크한 결과, 상위 3개 성능 순위를 모두 배열 기반 구현이 차지했다. Johnny’s Software Lab의 벤치마크에서는 더 극적인 결과가 나왔다:
- 메모리가 연속적으로 배치된 연결 리스트: ~0.12초
- 랜덤하게 배치된 연결 리스트: 중간 데이터셋에서 68배 느림, 큰 데이터셋에서 125배 느림
- 큰 연결 리스트의 L3 캐시 미스율: 99% — 캐시가 사실상 무용지물
Ulrich Drepper의 증거
Ulrich Drepper는 2007년 논문 “What Every Programmer Should Know About Memory”에서 이 현상을 체계적으로 실험했다. 그가 보여준 핵심 결과:
- 순차 접근(배열): 데이터 크기가 L1 캐시를 초과해도, 하드웨어 프리페처 덕분에 지연 시간이 거의 증가하지 않음
- 랜덤 접근(연결 리스트와 유사): 데이터 크기가 각 캐시 레벨을 초과할 때마다 지연 시간이 계단식으로 급증
- L1 → L2 경계에서 ~4배, L2 → L3 경계에서 ~3배, L3 → RAM 경계에서 ~8배 이상 증가
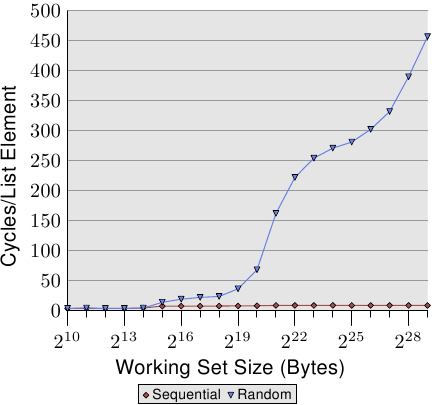 Drepper 2007 논문의 Figure 3.15. X축은 작업 데이터 크기(2^10 ~ 2^29 바이트), Y축은 원소당 접근 사이클. 순차 접근(Sequential, 빨간 다이아몬드)은 데이터 크기와 무관하게 거의 0에 가깝지만, 랜덤 접근(Random, 파란 삼각형)은 캐시를 초과하는 순간 급격히 치솟는다. (출처: lwn.net)
Drepper 2007 논문의 Figure 3.15. X축은 작업 데이터 크기(2^10 ~ 2^29 바이트), Y축은 원소당 접근 사이클. 순차 접근(Sequential, 빨간 다이아몬드)은 데이터 크기와 무관하게 거의 0에 가깝지만, 랜덤 접근(Random, 파란 삼각형)은 캐시를 초과하는 순간 급격히 치솟는다. (출처: lwn.net)
순차 접근의 선은 거의 평평하다. 프리페처가 모든 것을 해결한다. 반면 랜덤 접근은 데이터가 캐시에 담기지 않는 순간 급격히 느려진다. 자료구조의 메모리 배치가 알고리즘 복잡도만큼이나 성능을 결정한다는 것을 수치로 증명한 논문이다.
잠깐, 이건 짚고 넘어가자
Q. 그럼 연결 리스트는 쓸 일이 없는 건가?
아니다. 연결 리스트가 여전히 유효한 경우가 있다:
- 매우 큰 원소: 원소 크기가 수 KB 이상이면, 원소 이동 비용이 포인터 교체보다 크다
- 빈번한 중간 삽입/삭제 + 위치를 이미 아는 경우: 이터레이터를 보유한 상태에서의 O(1) 삽입
- 안정적 참조가 필요한 경우: 배열은 재할당 시 모든 포인터가 무효화되지만, 리스트의 노드 주소는 변하지 않는다
- OS 커널 내부: 리눅스 커널의 스케줄러 큐, 메모리 관리 등에서
list_head구조체를 광범위하게 사용한다핵심은 “리스트를 쓰지 말라”가 아니라 “기본값은 배열이되, 리스트가 필요한 이유를 설명할 수 있을 때만 리스트를 쓰라”는 것이다.
Part 5: 동적 배열 — 크기가 변하는 배열의 비밀
정적 배열의 크기는 컴파일 타임에 결정된다. 하지만 현실에서는 데이터가 얼마나 들어올지 미리 알 수 없는 경우가 대부분이다. 그래서 동적 배열(dynamic array)이 필요하다.
C++의 std::vector, Java의 ArrayList, C#의 List<T>, Python의 list — 모두 동적 배열이다.
기본 원리
동적 배열은 내부에 고정 크기 배열을 가지고 있다. 원소가 추가되어 배열이 꽉 차면:
- 더 큰 배열을 새로 할당한다
- 기존 원소를 전부 복사한다
- 기존 배열을 해제한다
1
2
3
4
5
6
7
상태 1: capacity=4, size=4 (꽉 참)
[1] [2] [3] [4]
push_back(5) 호출 → 용량 부족!
상태 2: capacity=8, size=5 (새 배열 할당 + 복사)
[1] [2] [3] [4] [5] [ ] [ ] [ ]
문제는 “더 큰 배열”을 얼마나 크게 만드느냐다.
성장 인자 — 2배 vs 1.5배
가장 흔한 전략은 기하급수적 성장(geometric growth)이다. 용량이 부족하면 현재 용량의 일정 배수로 늘린다.
2배 성장 (std::vector in GCC/Clang):
1
4 → 8 → 16 → 32 → 64 → 128 → 256 → ...
1.5배 성장 (std::vector in MSVC, folly::fbvector):
1
4 → 6 → 9 → 13 → 19 → 28 → 42 → ...
왜 1.5배를 선택하는 구현이 있을까? Facebook의 folly::fbvector 구현 문서에 그 이유가 설명되어 있다:
2배 성장의 문제: 새로 필요한 메모리 크기가 이전에 해제한 모든 블록의 합보다 항상 크다.
\[2^n > 2^0 + 2^1 + 2^2 + \cdots + 2^{n-1} = 2^n - 1\]따라서 이전에 해제된 메모리 블록을 절대 재사용할 수 없다. 메모리 할당자는 항상 새로운 영역을 찾아야 한다.
반면 1.5배 성장에서는 일정 횟수 이후 이전 블록들을 합치면 새 블록 크기를 만족할 수 있다:
\[1.5^n < 1.5^0 + 1.5^1 + \cdots + 1.5^{n-1} \quad (\text{n이 충분히 클 때})\]이론적으로 성장 인자가 황금비 φ ≈ 1.618 이하면 이전 블록 재사용이 가능해진다.
| 성장 인자 | 사용 예 | 이전 메모리 재사용 | 재할당 빈도 |
|---|---|---|---|
| 2배 | GCC/Clang vector | 불가능 | 낮음 |
| 1.5배 | MSVC vector, folly::fbvector | 가능 (4번째 재할당 후) | 중간 |
| φ ≈ 1.618 | 이론적 최적 경계 | 가능 | 중간 |
실제 언어별 구현을 비교하면:
| 언어/구현 | 성장 인자 | 비고 |
|---|---|---|
GCC/Clang std::vector | 2.0 | |
MSVC std::vector | 1.5 | |
Java ArrayList | 1.5 | |
C# List<T> | 2.0 | |
Rust Vec | 2.0 | |
Python list | ~1.125 | 0, 4, 8, 16, 24, 32, 40, 52… |
Go slice | 2.0 (≤1024), 1.25 (>1024) | 크기에 따라 변동 |
Facebook folly::fbvector | 1.5 | 4KB까지는 2배, 이후 1.5배 |
상각 분석 — O(1)의 비밀
동적 배열에 n번 push_back하면, 일부 삽입에서 O(n) 복사가 발생한다. 그런데 왜 “push_back은 O(1)”이라고 하는가?
상각 분석(amortized analysis)의 핵심 아이디어는, 비싼 연산의 비용을 싼 연산에 분산시키는 것이다.
2배 성장 기준으로, n번 삽입 시 발생하는 총 복사 횟수를 계산하자:
- capacity 1 → 2: 1개 복사
- capacity 2 → 4: 2개 복사
- capacity 4 → 8: 4개 복사
- …
- capacity n/2 → n: n/2개 복사
총 복사 횟수:
\[1 + 2 + 4 + 8 + \cdots + \frac{n}{2} = n - 1\]n번 삽입에서 총 n - 1번 복사. 삽입당 평균 복사 횟수:
\[\frac{n - 1}{n} < 1\]따라서 상각 O(1). 가끔 O(n)이 터지지만, 전체를 평균하면 O(1)이라는 뜻이다.
이 분석 방법은 Robert Tarjan이 1985년 논문 “Amortized Computational Complexity”에서 형식화했다. 세 가지 기법이 있다:
- 집계법(Aggregate Method): 총 비용을 연산 수로 나눈다 (위에서 사용한 방법)
- 회계법(Accounting Method): 싼 연산에 “크레딧”을 부여하여 비싼 연산을 미리 지불
- 포텐셜법(Potential Method): 자료구조의 “포텐셜 에너지”를 정의하여 비용을 분석
세 가지 방법 모두 같은 결론에 도달한다: 동적 배열의 기하급수적 성장은 상각 O(1) 삽입을 보장한다.
잠깐, 이건 짚고 넘어가자
Q. 상각 O(1)이면 최악의 경우에도 괜찮은 건가?
아니다. 개별 삽입은 여전히 O(n)이 될 수 있다. 실시간 시스템에서 16.67ms(60fps) 안에 프레임을 완료해야 하는데, 그 프레임에서 재할당이 터지면 문제가 된다. 이런 경우에는:
reserve()로 미리 용량을 확보하거나- 오브젝트 풀을 사용하거나
- 재할당 없는 자료구조(예: 청크 리스트)를 고려한다
Q. reserve()는 언제 쓰는 게 좋은가?
원소 개수의 상한을 알 때.
vector.reserve(1000)을 호출하면 1000개까지는 재할당 없이 삽입된다. 이것만으로도 불필요한 재할당을 제거하고, 성능을 예측 가능하게 만들 수 있다.
Part 6: 시간 복잡도를 올바르게 읽는 법
Big-O는 상한이다
Big-O 표기법의 정확한 정의:
\[f(n) = O(g(n)) \iff \exists\, c > 0,\, n_0 > 0 \text{ such that } f(n) \leq c \cdot g(n) \text{ for all } n \geq n_0\]f(n)이 O(g(n))이라는 것은, n이 충분히 크면 f(n)이 c·g(n)을 넘지 않는다는 뜻이다. 상한(upper bound)이다.
따라서:
- 배열 접근이 O(1)이라는 것은, 입력 크기에 관계없이 상수 시간에 완료된다는 뜻이다
- 선형 탐색이 O(n)이라는 것은, 최악의 경우 n에 비례하는 시간이 걸린다는 뜻이다
Big-O가 숨기는 것
Big-O는 상수 인자를 무시한다. O(n)이 O(n log n)보다 “빠르다”고 말하지만, 상수가 다르면 실제로는 역전될 수 있다:
- 알고리즘 A: $100n$ → O(n)
- 알고리즘 B: $2n \log n$ → O(n log n)
n = 1,000일 때:
- A: 100,000
- B: 2 × 1,000 × 10 = 20,000
O(n)인 A가 O(n log n)인 B보다 5배 느리다. n이 매우 커야 A가 역전한다.
그리고 앞서 살펴본 캐시 미스 비용이 바로 이 “상수”에 해당한다. 배열과 연결 리스트가 둘 다 O(n) 순회이지만, 연결 리스트의 “상수”에는 캐시 미스 100ns가 포함되어 있고, 배열의 “상수”에는 캐시 히트 1ns만 포함되어 있다.
세 가지 표기법
| 표기법 | 의미 | 비유 |
|---|---|---|
| O(f(n)) | 상한 (최악의 경우 이보다 나쁘진 않다) | 천장 |
| Ω(f(n)) | 하한 (최선의 경우 이보다 좋진 않다) | 바닥 |
| Θ(f(n)) | 정확한 차수 (상한과 하한이 같다) | 정확한 높이 |
예시:
- 정렬된 배열에서 이진 탐색: O(log n), Ω(1) (첫 번째에 찾을 수도 있으니), Θ(log n) 평균
- 정렬되지 않은 배열에서 선형 탐색: O(n), Ω(1), 평균 Θ(n/2) = Θ(n)
복잡도만으로 판단하면 안 되는 이유
지금까지의 논의를 종합하면:
- Big-O는 상수를 무시한다 — 캐시 미스 비용이 그 “상수”에 숨어 있다
- Big-O는 입력 크기가 충분히 클 때를 가정한다 — 현실에서 n이 작으면 상수가 지배한다
- 메모리 접근 패턴이 성능을 결정한다 — 같은 O(n)이라도 순차 접근과 랜덤 접근은 100배 차이
이것이 Mike Acton(전 Insomniac Games 엔진 프로그래머)이 GDC 2014 강연 “Data-Oriented Design and C++”에서 강조한 핵심이다:
“Where there is one, there are many. If you have a problem and you’re applying the solution to one thing, it almost certainly should be applied to more than one.”
데이터가 하나만 있는 경우는 거의 없다. 데이터가 여러 개일 때, 그 데이터가 메모리에 어떻게 배치되는지가 알고리즘 복잡도보다 중요할 수 있다. Chandler Carruth(LLVM 리드 개발자)는 같은 해 CppCon 2014에서 더 직접적으로 표현했다:
“Discontiguous data structures are the root of all (performance) evil.”
(비연속적 자료구조는 모든 (성능) 악의 근원이다.)
이것이 데이터 지향 설계(Data-Oriented Design)의 출발점이며, 이후 시리즈 고급 주제에서 다시 다룬다.
Part 7: 정리 — 배열과 연결 리스트 비교표
종합 비교
| 특성 | 배열 (Array) | 연결 리스트 (Linked List) |
|---|---|---|
| 메모리 배치 | 연속 | 분산 |
| 인덱스 접근 | O(1) | O(n) |
| 순차 순회 | O(n), 캐시 친화적 | O(n), 캐시 비친화적 |
| 맨 끝 삽입 | 상각 O(1) | O(1) (tail 포인터 있을 때) |
| 중간 삽입 | O(n) — 원소 이동 | O(1) — 포인터 교체 (위치를 아는 경우) |
| 중간 삭제 | O(n) — 원소 이동 | O(1) — 포인터 교체 (위치를 아는 경우) |
| 메모리 오버헤드 | 없음 (+ 미사용 capacity) | 노드당 포인터 1~2개 |
| 참조 안정성 | 재할당 시 무효화 | 항상 유효 |
| 캐시 성능 | 매우 좋음 | 나쁨 |
| 할당 비용 | 한 번 (+ 재할당) | 노드당 한 번 |
언제 무엇을 쓰는가
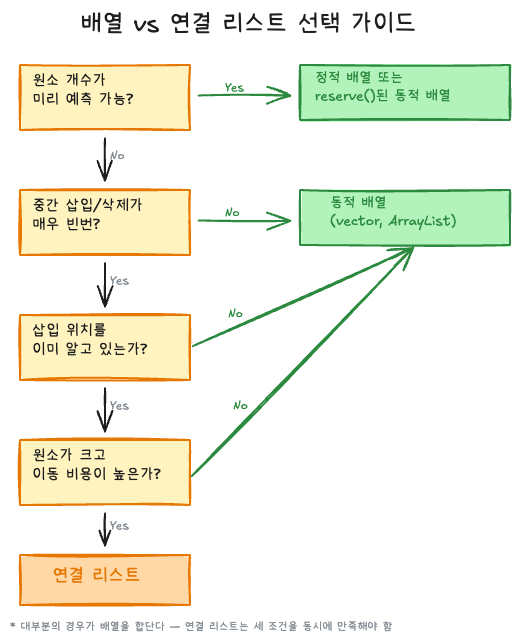
대부분의 경로가 배열로 향한다. 연결 리스트로 가려면 세 가지 조건을 동시에 만족해야 한다: 빈번한 중간 삽입, 위치를 이미 알고 있음, 원소 이동 비용이 높음. 이 조건이 동시에 성립하는 경우는 생각보다 드물다.
마무리: 자료구조는 추상이 아니라 물리다
이 글에서 살펴본 핵심:
메모리 계층 구조가 모든 성능의 출발점이다. L1 캐시(1ns)와 RAM(100ns)의 100배 격차가 자료구조 선택의 실질적 기준이 된다.
배열은 단순하지만 강력하다. 연속된 메모리 배치 덕분에 캐시 지역성, 하드웨어 프리페칭, 효율적 메모리 복사의 혜택을 모두 받는다.
연결 리스트의 이론적 장점은 현대 하드웨어에서 상쇄된다. O(1) 삽입의 장점보다 캐시 미스의 비용이 클 때가 많다. Stroustrup과 Drepper의 실험이 이를 증명한다.
동적 배열의 기하급수적 성장은 상각 분석을 통해 O(1) 삽입을 보장한다. 성장 인자(2배 vs 1.5배)는 메모리 재사용과 재할당 빈도의 트레이드오프다.
Big-O는 출발점이지 결론이 아니다. 상수 인자, 캐시 성능, 메모리 접근 패턴까지 고려해야 자료구조를 올바르게 선택할 수 있다.
자료구조 교과서의 첫 장은 보통 추상적 인터페이스(ADT)에서 시작한다. “리스트는 삽입, 삭제, 접근을 지원하는 추상 자료형이다.” 이 추상화는 개념을 배울 때는 유용하지만, 실제 코드를 작성할 때는 구현의 물리적 특성을 무시할 수 없다.
Dijkstra가 말한 것처럼, 추상화의 목적은 모호해지기 위한 것이 아니라, 정밀해지기 위한 것이다. 배열과 연결 리스트의 추상적 차이(접근 O(1) vs O(n))를 아는 것에서 그치지 않고, 왜 그런 차이가 발생하는지, 그리고 그 차이가 실제 하드웨어에서 어떻게 증폭되는지까지 이해할 때, 비로소 자료구조를 진정으로 이해한 것이다.
다음 편에서는 스택, 큐, 덱 — 제한된 접근이 만드는 강력한 추상화를 다룬다.
참고 자료
핵심 논문 및 기술 문서
- Drepper, U., “What Every Programmer Should Know About Memory” (2007) — lwn.net
- Tarjan, R., “Amortized Computational Complexity”, SIAM Journal on Algebraic and Discrete Methods (1985)
- Frigo, M. et al., “Cache-Oblivious Algorithms”, Proceedings of the 40th FOCS (1999) — 캐시를 모르는 상태에서도 최적에 가까운 캐시 성능을 달성하는 알고리즘 설계
- Dean, J. & Barroso, L.A., “The Tail at Scale”, Communications of the ACM (2013) — 지연 시간 수치의 원전
강연 및 발표
- Stroustrup, B., “Why you should avoid Linked Lists” — 다수의 C++ 컨퍼런스 키노트에서 반복 발표
- Acton, M., “Data-Oriented Design and C++”, GDC 2014 — 데이터 배치가 성능을 결정한다는 핵심 메시지
- Carruth, C., “Efficiency with Algorithms, Performance with Data Structures”, CppCon 2014 — 데이터 구조의 물리적 특성과 성능의 관계
교재
- Cormen, T.H. et al., Introduction to Algorithms (CLRS), MIT Press — 알고리즘 분석의 표준 교재, 상각 분석 Chapter 17
- Bryant, R. & O’Hallaron, D., Computer Systems: A Programmer’s Perspective (CS:APP), Pearson — 메모리 계층 구조 Chapter 6
- Hennessy, J. & Patterson, D., Computer Architecture: A Quantitative Approach, Morgan Kaufmann — 캐시 설계와 성능 분석
- Knuth, D., The Art of Computer Programming Vol. 1: Fundamental Algorithms, Addison-Wesley — 배열과 연결 리스트의 고전적 분석
- Sedgewick, R. & Wayne, K., Algorithms, 4th Edition, Addison-Wesley
추가 논문 및 벤치마크
- “RIP Linked List”, arXiv:2306.06942 (2023) — 다양한 리스트 구현의 포괄적 실증 비교
- Johnny’s Software Lab, “The Quest for the Fastest Linked List” — 연결 리스트 메모리 배치에 따른 극단적 성능 차이 실측
- Lemire, D., “How fast should your dynamic arrays grow?” (2013) — 성장 인자에 대한 수학적 분석
구현 참고
- Facebook
folly::fbvector— 1.5배 성장 인자 선택의 근거가 문서화되어 있음 - Linux 커널
list.h— 이중 연결 리스트의 커널 수준 활용 사례